

The group for Robotics and Automation in Manufacturing investigates new mechanics and control software to advance the design and operation of Flexible Manufacturing Systems. In particular, the following thematic areas are addressed considering a variety of technologies. The group deals with Research & Innovation, as well as with technology development.
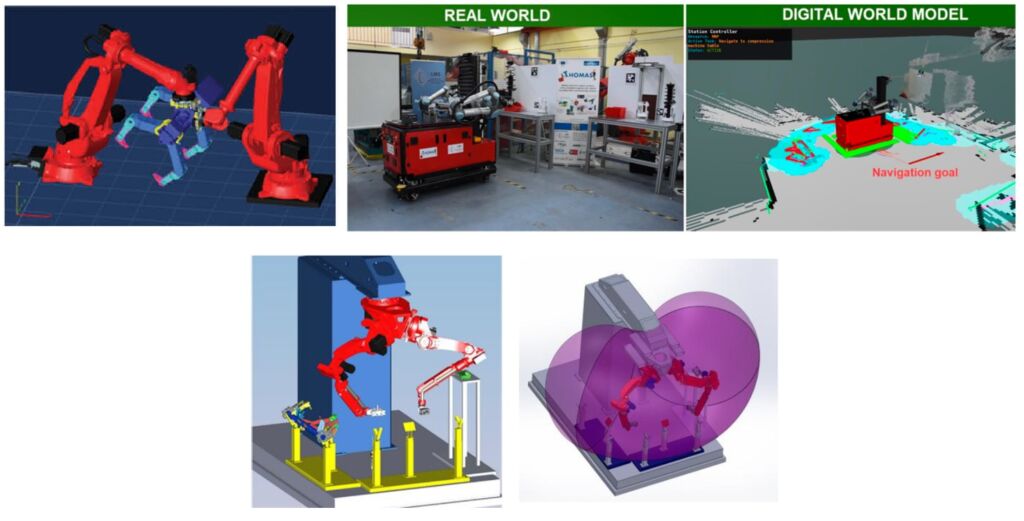
The topics in this field involve the study of kinematic and dynamic planning of robotic systems that van collaborate with each other. Research activities involve motion generation, task planning, human-robot interaction, human safety, intuitive and interactive robot programming. Such robotic systems allow for implementing the concept of flexible production in Industry and involve dual or multiple arms with a high degree of freedom that exhibit significant complexity in terms of kinematic and dynamic behavior. Autonomous mobile robotic vehicles used for transporting products/components and implementing production processes are also researched. These vehicles are equipped with a multitude of sensors for autonomous navigation and mapping of the environment (lidars, laser scanners, RGBd cameras, etc.) and can also carry robotic arms or other systems for performing various tasks.
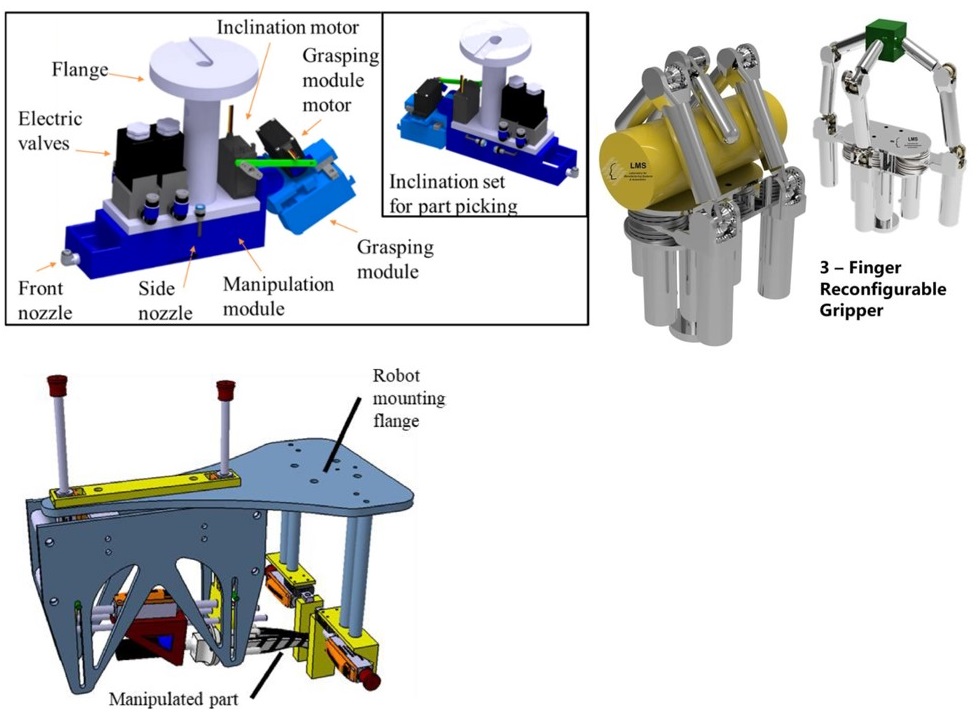
Dexterous mechanisms and handling devices for components are also under the scope of this topic including design, modeling, simulation, and control of reconfigurable devices capable of grasping, manipulating, assembling, or processing complex components. The range of mechanisms varies both by design principle (type of actuators, degrees of freedom, type of interaction with the component) and by the type of product (continuous/discrete, flexible/compact, etc.).
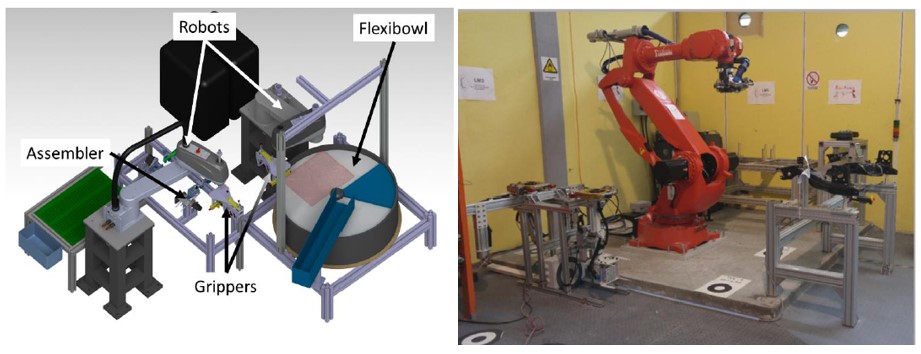
At the system level the field encompasses activities for the design, and implementation of flexible production stations: integrated stations used for the evaluation and verification of the correct operation of all mechanical systems and peripheral equipment required for assembly, processing, inspection, etc.
REFERENCES/DEMOS:
- Aivaliotis, P., Michalos, G., & Makris, S. (2018). Cooperating robots for fixtureless assembly: modelling and simulation of tool exchange process. International Journal of Computer Integrated Manufacturing, 31(12), 1235–1246. link
- Tsarouchi, P., Makris, S., Michalos, G., Stefos, M., Fourtakas, K., Kaltsoukalas, K., Kontrovrakis, D., & Chryssolouris, G. (2014). Robotized Assembly Process Using Dual Arm Robot. 5th – CIRP Conference on Assembly Technologies and
- Michalos, G., Dimoulas, K., Mparis, K., Karagiannis, P., & Makris, S. (2018). A novel pneumatic gripper for in-hand manipulation and feeding of lightweight complex parts—a consumer goods case study. International Journal of Advanced Manufacturing Technology, 97(9–12), 3735–3750. link
- Spiliotopoulos, J., Michalos, G., & Makris, S. (2018). A reconfigurable gripper for dexterous manipulation in flexible assembly. Inventions, 3(1).link
- Michalos, G., Makris, S., & Chryssolouris, G. (2015). The new assembly system paradigm. International Journal of Computer Integrated Manufacturing, 28(12), 1252–1261.
- Bavelos, A. C., Kousi, N., Gkournelos, C., Lotsaris, K., Aivaliotis, S., Michalos, G., & Makris, S. (2021). Enabling Flexibility in Manufacturing by Integrating Shopfloor and Process Perception for Mobile Robot Workers. Applied Sciences, 11(9), 3985. link
- Consumer goods industry: Feeding Scenario
- X-act Project
- Multipurpose Reconfigurable Robotic Cell
- Task execution Coordination
- Cognitive mobile dual arm robots for reconfigurable manufacturing systems
This research field focuses on the technologies to enable seamless and smooth collaboration between humans and robots. It addresses technologies such as low/ medium/ high payload collaborative robots, interactions mechanisms (physical contact, voice, visual etc), safety systems, perception (product, process, environment) and cognition capabilities. Orchestration and coordination of human robot collaborative tasks is examined via methods for the dynamic rescheduling of tasks and assignment of tasks to resources and operators.

REFERENCES/DEMOS:
- Michalos, G., Makris, S., Spiliotopoulos, J., Misios, I., Tsarouchi, P., & Chryssolouris, G. (2014). ROBO-PARTNER: Seamless human-robot cooperation for intelligent, flexible and safe operations in the assembly factories of the future. Procedia CIRP, 23, 71-76. link
- Michalos, G., Kousi, N., Karagiannis, P., Gkournelos, C., Dimoulas, K., Koukas, S., Mparis, K., Papavasileiou, A., & Makris, S. (2018). Seamless human robot collaborative assembly – An automotive case study. Mechatronics, 55, 194–211. link
- Michalos, P. Karagiannis, N. Dimitropoulos, D. Andronas, S, Makris, “Human Robot Collaboration in Industrial Environments” in The 21st Century Industrial Robot – When Tools become Collaborators – Accepted for publication by Springer, Editors: Maria Isabel Aldinhas Ferreira and Sarah R. Fletcher
- K. Katsampiris-Salgado, Kevin Haninger, Christos Gkrizis, Nikos Dimitropoulos, Jörg Krüger, George Michalos, Sotiris Makris, Collision detection for collaborative assembly operations on high-payload robots, Robotics and Computer-Integrated Manufacturing, Volume 87, 2024, 102708, ISSN 0736-5845, link.
- Solar thermal collectors production using high payload collaborative robots
- Industrial modules assembly using low payload collaborative robot
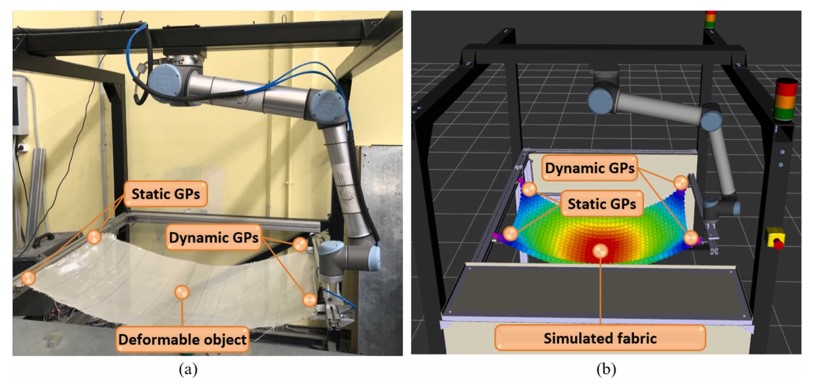
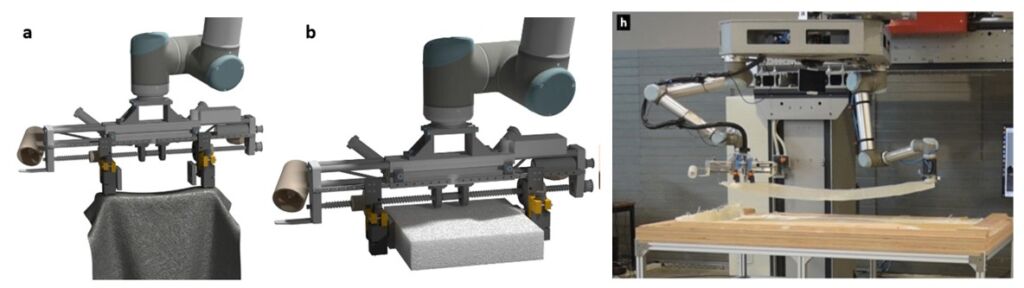
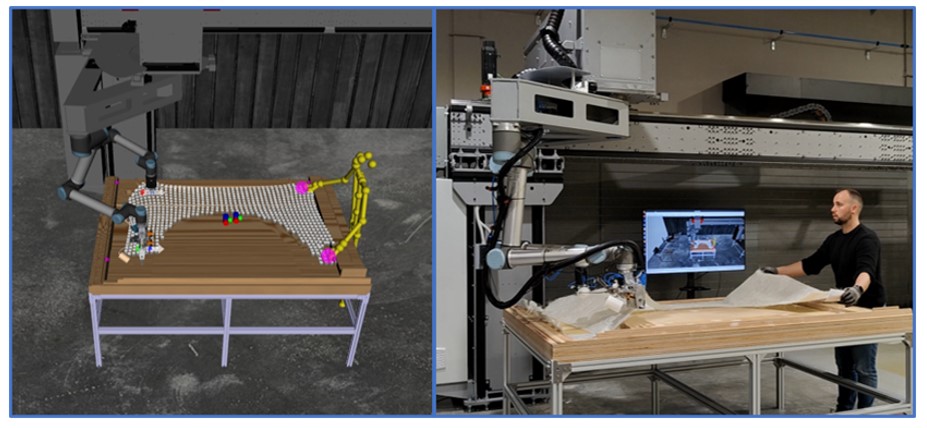
Handling deformable materials, and especially fabrics, remains a significant challenge within the industrial landscape. Through the implementation of advanced optimization algorithms and artificial intelligence (AI), LMS has devised methodologies that seamlessly link the digital representation of an object to its tangible, real-world behavior.
LMS leads the way in crafting innovative multifunctional end-effectors to tackle industry challenges. Enhancing robot dexterity drives progress in efficiency, product quality, ergonomics, and worker well-being.
A crucial aspect of enhancing robots with cognitive abilities involves enabling them to interact with objects in the industrial environment and respond effectively. LMS develops of model-based planning frameworks for robot agents, integrating advanced algorithms and strategies.
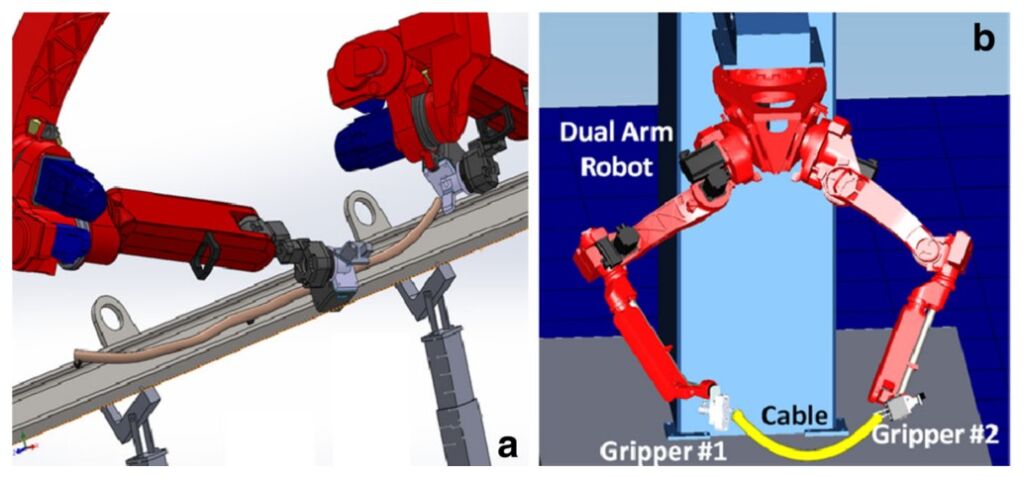
Similarly LMS develops sophisticated models using intricate mathematical equations to make accurate predictions about the deformation and twisting behavior of cables and other linear flexible materials employing simulation strategies to enhance the capabilities of robotic manipulation
REFERENCES:
- On deformable object handling: Model-based motion planning for human-robot co-manipulation
- Cyber-physical systems in non-rigid assemblies: A methodology for the calibration of deformable object reconstruction models
- On modelling and handling of flexible materials: A review on Digital Twins and planning systems
- Twist modelling for assembly of wiring harnesses
- Simulating robotic manipulation of cabling and interaction with surroundings
- Prediction of cabling shape during robotic manipulation
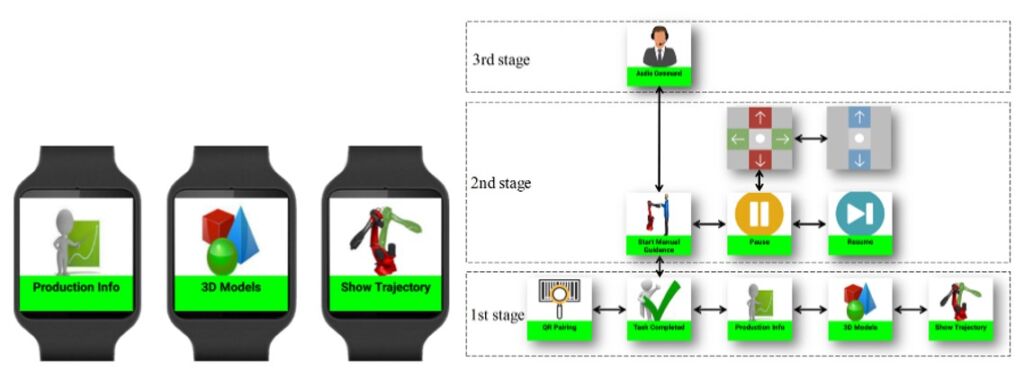
Augmented Reality (AR) tools have been implemented in aid of operators being in a hybrid, human and robot collaborative industrial environment. The system aims to provide production and process-related information and enhance the operators’ immersion in the safety mechanisms, dictated by the collaborative workspace. Supported functionalities include: Assembly guidance provision through textual information or holograms, Hologram-based robot controlling, Interaction with gripping tools, inspection results visualization, Safety awareness etc

Wearable devices support operators in shared industrial workplaces where humans and robots coexist. LMS focuses on the development of the smart wearable applications and their integration with the network of resources.
REFERENCES/DEMOS:
- Makris, S., Karagiannis, P., Koukas, S., Matthaiakis, A.-S., 2016. Augmented reality system for operator support in human–robot collaborative assembly. CIRP Annals 65, 61–64. link
- Michalos, G., Kousi, N., Karagiannis, P., Gkournelos, C., Dimoulas, K., Koukas, S., Mparis, K., Papavasileiou, A., Makris, S., 2018. Seamless human robot collaborative assembly – An automotive case study. Mechatronics 55, 194–211. link
- Papanastasiou, S., Kousi, N., Karagiannis, P., Gkournelos, C., Papavasileiou, A., Dimoulas, K., Baris, K., Koukas, S., Michalos, G., Makris, S., 2019. Towards seamless human robot collaboration: integrating multimodal interaction. Int J Adv Manuf Technol 105, 3881–3897. link
- Aivaliotis, S., Papavasileiou, A., Konstantinou , C., Anastasiou, T., Gkournelos, C., Koukas, S., Makris, S., An interactive Augmented Reality based framework assisting operators in human-robot collaborative assembly operations, 17th CIRP Conference on Intelligent Computation in Manufacturing Engineering
- Gkournelos, C., Karagiannis, P., Kousi, N., Michalos, G., Koukas, S., Makris, S., 2018. Application of Wearable Devices for Supporting Operators in Human-Robot Cooperative Assembly Tasks. Procedia CIRP 76, 177–182. link
- Michalos, G., Kousi, N., Karagiannis, P., Gkournelos, C., Dimoulas, K., Koukas, S., Mparis, K., Papavasileiou, A., Makris, S., 2018. Seamless human robot collaborative assembly – An automotive case study. Mechatronics 55, 194–211. link
- Indirect Human-Robot interaction using AR and smart devices
LMS researches AI algorithms for real-time interpretation and adaptation to human actions as well as Large Language Models (LLMs) for enabling natural Human Robot Collaboration with the aim of enhancing collaborative efficiency between humans and robots in manufacturing. AI is also used to enhance robot sensorial activities such as vision-based robot guidance and quality inspection and complex manufacturing environments.
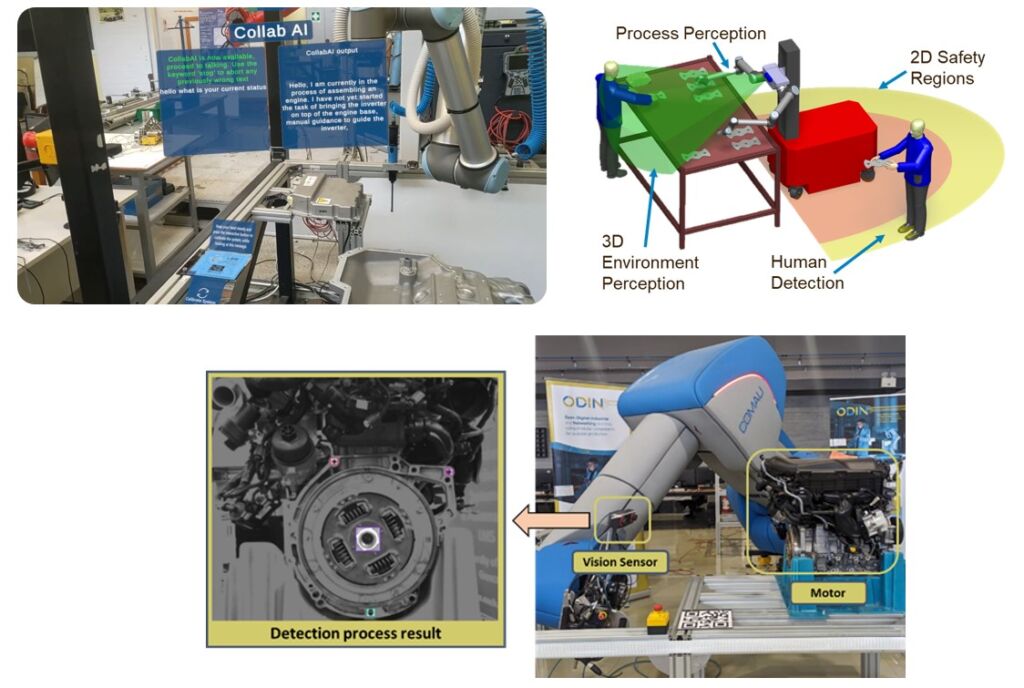
Additionally, AI is used to enhance robotic motion planning with the use of AI enabled vision systems as well as to increase safety via applying predictive collision avoidance in shared human-robot workspaces.
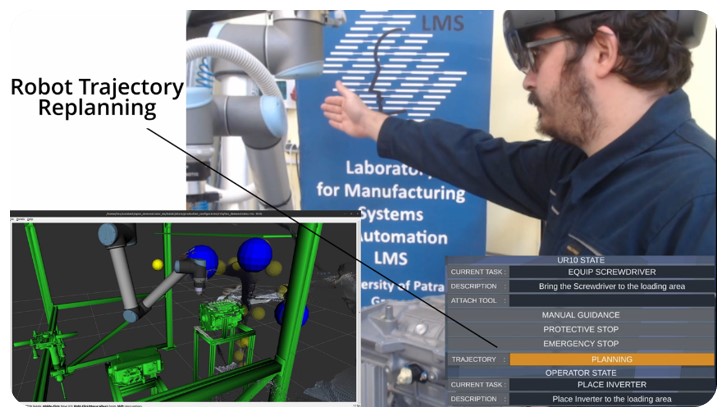
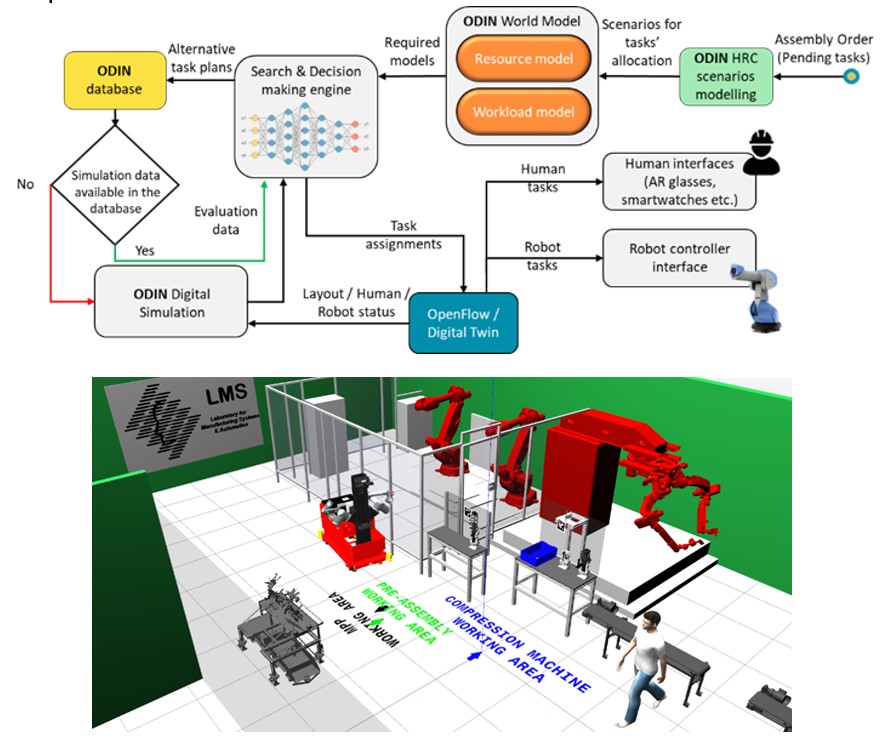
In the field of Task Planning and Orchestration LMS develops search based decision-making solutions for performing tasks allocation in HRC workcells. These solutions are based on Artificial Intelligence algorithms based on custom heuristic functions for the quick generation of the alternative task plans.
Demos
REFERENCES/DEMOS:
- Karagiannis, P., Kousi, N., Michalos, G., Dimoulas, K., Mparis, K., Dimosthenopoulos, D., Tokçalar, Ö., Guasch, T., Gerio, G.P., Makris, S., 2022. Adaptive speed and separation monitoring based on switching of safety zones for effective human robot collaboration. Robotics and Computer-Integrated Manufacturing 77, 102361. link
- Praxis: a framework for AI-driven human action recognition in assembly, C Gkournelos, C Konstantinou, P Angelakis, E Tzavara, S Makris Journal of Intelligent Manufacturing, 1-15. link
- Α Behavior Trees-based architecture towards operation planning in hybrid manufacturing G Kokotinis, G Michalos, Z Arkouli, S Makris International Journal of Computer Integrated Manufacturing, 1-26. link
- An approach for task and action planning in human-robot collaborative cells using AI, Evangelou, N. Dimitropoulos, G. Michalos, S. Makris 8th CIRP Conference on Assembly Technologies and Systems (CATS 2020), 29 Sept – 1 Oct, Athens, Greece (2020). link
- Digital twin for adaptation of robots’ behavior in flexible robotic assembly lines, N Kousi, C Gkournelos, S Aivaliotis, C Giannoulis, G Michalos, S Makris Procedia manufacturing 28, 121-126.link
- An approach for monitoring the execution of human based assembly operations using machine learning, G Andrianakos, N Dimitropoulos, G Michalos, S Makris Procedia Cirp 86, 198-203. link
- Mobile dual arm workers assisting human operators for reconfigurable assembly
- A collaborative assembly case from the automotive industry
- Workspace monitoring and shopfloor digital twin for Human-Robot collaborative applications
- AI-driven real-time task and action planning for human-robot collaborative applications
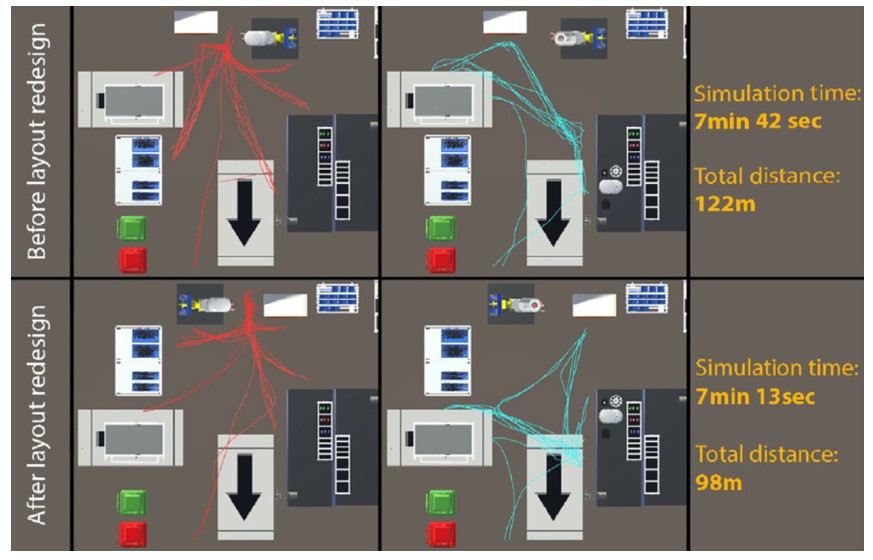
This research field focuses on integrating human-centric approaches into the production system. Through these methods the workplace environment and processes are analyzed from an ergonomic perspective to identify areas of improvement on the design of a workplace and difficulties that can be eliminated in the processes performed. It makes use of technologies such as vision systems and wearable sensors to record human activities. Also, VR technology combined with vision systems can be utilized as a cost effective solution for workplace and process design, evaluation, and re-design.
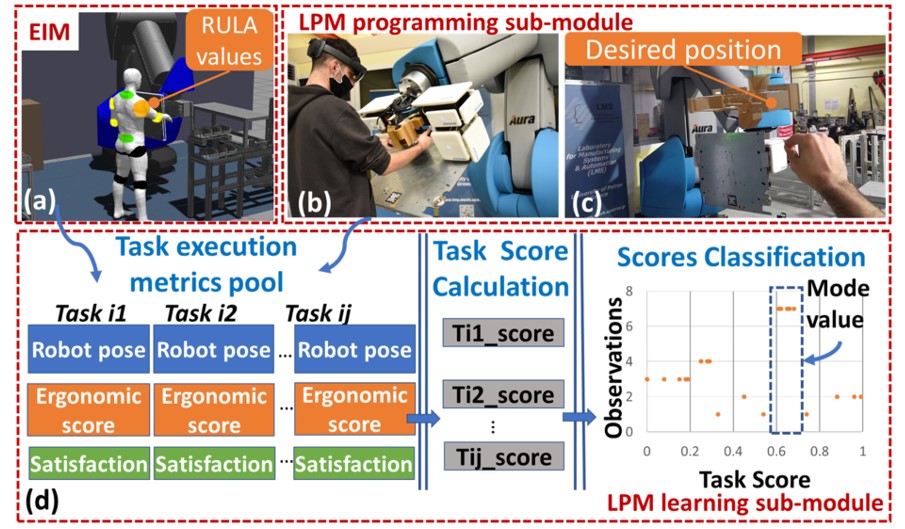
Virtual Reality tools have also been implemented for product and processes design, operator training in safe environments, and also for robot control and teleoperation. These virtual reality tools aim to assist engineers and operators in their daily activities.
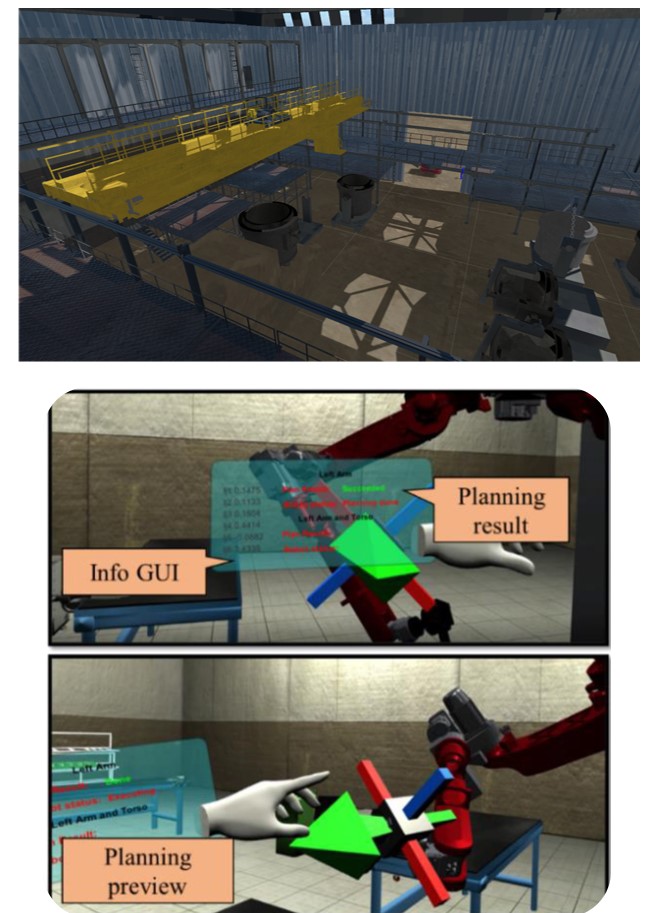
Novel methods to incorporate human detection in robot teleoperation is also a research field. Detection of human posture using various vision sensors and Integration with different robotic manipulator through Robotic Operating System (ROS) interfaces are some of the activities.

REFERENCES:
- Michalos, G., Karvouniari, A., Dimitropoulos, N., Togias, T., & Makris, S. (2018). Workplace analysis and design using virtual reality techniques. CIRP Annals, 67(1), 141-144.
- Dimitropoulos, N., Togias, T., Zacharaki, N., Michalos, G., & Makris, S. (2021). Seamless human–robot collaborative assembly using artificial intelligence and wearable devices. Applied Sciences, 11(12), 5699.
- Dimitropoulos, N., Togias, T., Michalos, G., & Makris, S. (2021). Operator support in human–robot collaborative environments using AI enhanced wearable devices. Procedia Cirp, 97, 464-469.
- Togias, T., Gkournelos, C., Angelakis, P., Michalos, G., & Makris, S. (2021). Virtual reality environment for industrial robot control and path design. Procedia CIRP, 100, 133-138.
- Karagiannis, P., Togias, T., Michalos, G., & Makris, S. (2021). Operators training using simulation and VR technology. Procedia CIRP, 96, 290-294.
Physics based models can be used to enhance various functionalities of industrial robots. Based on these LMS is developing methods for limiting the forces applied by industrial robotic manipulators by detecting the collision with its surroundings without the use of external sensors.

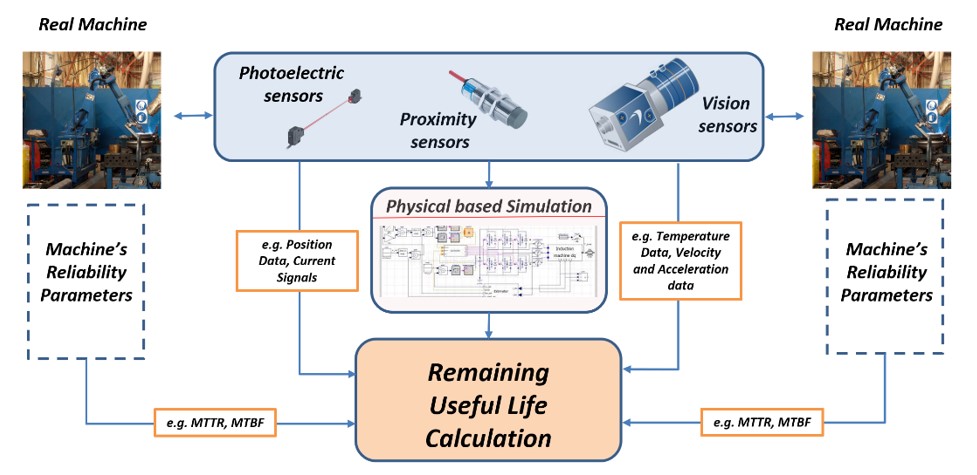
Research activities also focus on the determination of the Remaining Useful Life (RUL) of machinery equipment by utilizing physics-based simulation models and Digital Twin concept. This enables predictive maintenance for manufacturing resources using Prognostics and health management (PHM) techniques.
REFERENCES:
- P. Aivaliotis, S. Aivaliotis, C. Gkournelos, K. Kokkalis, G. Michalos, S. Makris,”Power and force limiting on industrial robots for human-robot collaboration”, Robotics and Computer-Integrated Manufacturing, Volume 59, pg. 346-360, (2019)
- P. Aivaliotis, E. Papalitsa, G. Michalos, S. Makris, “Identification of dynamic robot’s parameters using physics-based simulation models for improving accuracy”, 8th CIRP Global Web Conference – Flexible Mass Customisation (CIRPe 2020), Procedia CIRP, Volume 96, pg. 254-259 , 14-16 Oct, Leuven, Belgium (2020)
- Z. Arkouli, P. Aivaliotis, S. Makris, “Towards accurate robot modelling of flexible robotic manipulators”, 8th CIRP Conference on Assembly Technologies and Systems (CATS 2020), Procedia CIRP, Volume 97, pg. 497-501 , 28 Sept – 1 Oct, Athens, Greece (2020)
- P. Aivaliotis, Z. Arkouli, K. Georgoulias, S.Makris, “Degradation curves integration in physics-based models: Towards the predictive maintenance of industrial robots”, Robotics and Computer-Integrated Manufacturing, Volume 71, 102177, (2021)
- P. Aivaliotis, Z. Arkouli, D. Kaliakatsos-Georgopoulos, S. Makris, “Prediction assessment methodology for maintenance applications in manufacturing”, 54th CIRP Conference on Manufacturing Systems (CIRP CMS 2021), Procedia CIRP, Volume 104, pg. 1494-1499, 22–24 September (2021)